


新闻中心
NEWS center
2019年4月,特斯拉首次发布“影子模式”(shadow mode),这是一种全新的车端数据触发采集方式。不同于谷歌的Waymo公司通过自建庞大的车队来采集自动驾驶数据,特斯拉的自动驾驶模型作为“影子模式”,运行在车辆后台,但不参与控车,通过对模型的结果数据与驾驶员的行为数据分析,从而判断自动驾驶模型的“短板”,并上传对应的数据到云端。这样采集到的高价值数据,无疑是在海量自动驾驶数据中,工程师们所迫切需要的。而且,特斯拉的影子模式支持量产车上运行并采集数据,等同于将自己卖出的每一辆车,都能够化身为“数采车”,充分发挥量产车覆盖场景广、成本低的优势。
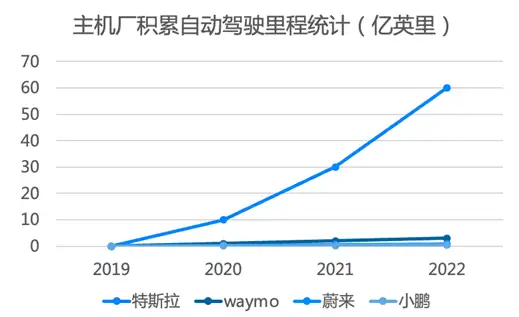
根据已有数据显示,特斯拉基于影子模式,已经在2021年累计行驶了超过60亿英里,谷歌的Waymo通过自建庞大的自动驾驶车队,也累计了约2亿英里的自动驾驶行驶数据。国内的造车新势力也紧随其后,蔚来与小鹏的自动驾驶路测里程也达到了近亿英里级别。很明显,具备影子模式的特斯拉在该项指标上,与潜在的竞争对手拉开了巨大的差距。
影子模式的优势
一、量产车即等同于“数采车”,所有上路车辆均可进行模型测试与数据搜集
影子模式适用于量产车,自动驾驶模型运行在车辆后台,只参与决策与模拟运行,实际不控车,也不会对驾驶者及车辆产生任何干扰。在有异常场景或模型与人的决策明显不同时,触发数据采集;这种方式与组建庞大的自动驾驶测试车队相比,实现了成本的大幅降低。
二、覆盖场景广泛
影子模式使得我们的量产车变身为“数采车”,量产车覆盖的路况、场景的广度等是小规模的数采车队/自动驾驶车队无法比拟的。传统方式中,我们通过设计场景进行专门的测试与数采,而使用影子模式的量产车所投身的是“实战环境”,通过安全的策略使得量产车既能兼顾行车安全,又可以探索无穷的场景。
三、使自动驾驶模型学习到真实人类的驾驶行为习惯
影子模式在执行过程中,也会实时的与驾驶员的驾驶行为数据进行比对,当差异的数据被送到自动驾驶模型中进行模型的训练迭代时,产生的新的模型会趋向于驾驶员的驾驶风格,从而使得自动驾驶模型更加偏向人类的驾驶风格。
四、可短时间内积累海量的自动驾驶行驶里程数据
正如前面的数据显示,特斯拉使用影子模式积累了海量的自动驾驶路测数据,这是传统的方式无法在短时间内达到的。
五、可实现新功能在量产车上的验证
传统车辆在新旧功能交替这一过程中,必须进行大量的功能测试以确保新功能的安全性与平稳运行。这一过程可能会由于场景设计不完备导致新功能在某些场景下失效。现在,可以在车端将新功能部署于影子模式内,与旧功能进行功能性能比对,从而实现在全场景下功能的验证与测试。
实现影子模式的瓶颈
然而,业界在探索实现影子模式的过程中,大都会碰到以下问题:
一、车端数据接入比对分析困难
OEM自建的自动驾驶算法等作为影子模式运行在车辆后台,与车端实际运行过程中产生的数据如何接入、解析、对比分析,以及比对结果如何触发数据上传等,是目前市面上传统方式难以实现的。这也限制了影子模式真正上车落地实现。
二、未知场景探索困难
自动驾驶模型研发过程中,会碰到无穷无尽的Corner Case,这些Corner Case会造成极大的安全隐患。目前我们只能解决有限的已知极限场景的处理,而隐藏在海面下的“冰山”还无法使用传统的方式高效挖掘。只有利用影子模式在量产车端覆盖更广的场景的时候,才可以发掘更多的Corner Case,提高自动驾驶的安全性。
三、好的驾驶员挑选困难
影子模式这一策略会趋向于学习驾驶员的驾驶行为,但如何判断驾驶员是否是“好”的驾驶员?如何让影子模式向安全的驾驶行为学习,这其中涉及到整套的驾驶员评价体系的搭建,极具挑战。
EXD影子模式数据闭环
基于以上的行业现状,EXD结合自身的产品矩阵,推出了“影子模式数据闭环解决方案”。
一、EXD提供车云全栈数据产品
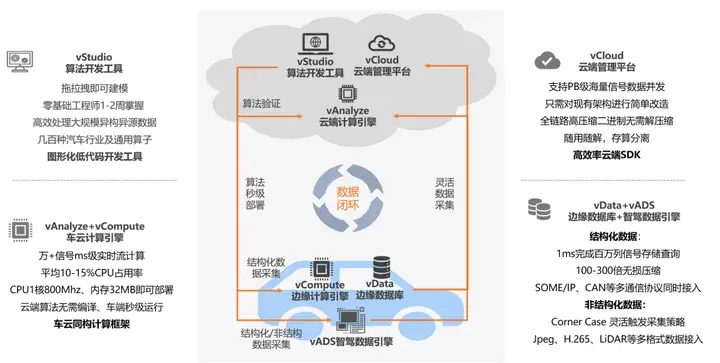
智协慧同数据产品矩阵包括:
--vStudio 云端算法开发平台
--vAnalyze 云端计算引擎
--vCloud 云端数据管理平台
--vCompute 车端计算引擎
--vData 车端时序数据库
--vADS 车端智驾数据引擎(处理结构化数据与非结构化数据)
二、EXD影子模式数据闭环优势
1,数据接入比对能力
EXD基于车端产品组件,可实现车端全维度数据接入,包括结整车CAN总线数据、车端多传感器数据例如摄像头图片数据、雷达点云数据等,囊括结构化数据与非结构化数据的接入处理。这也是“影子模式”可以在车端运行的前置条件。
2,边缘计算能力
EXD提供的vADS智驾数据引擎,实现车端比对分析模型的运行,异常场景的数据触发上传能力,可以支持当“影子模式”发现不一致的场景后,以灵活的数采方式,获取和上传有价值的场景数据,从而提升高价值高维度数据获取的效率。
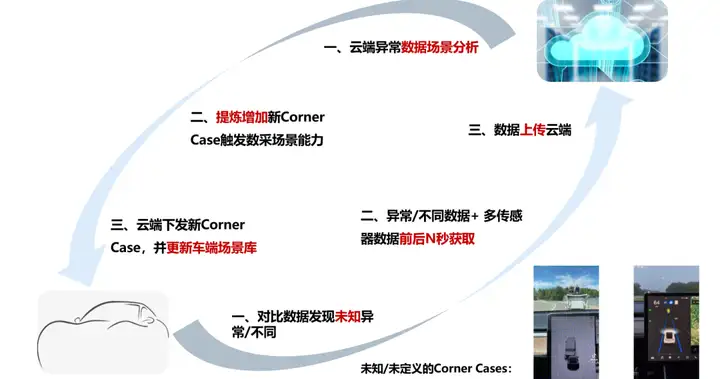
3,未知异常场景发现能力
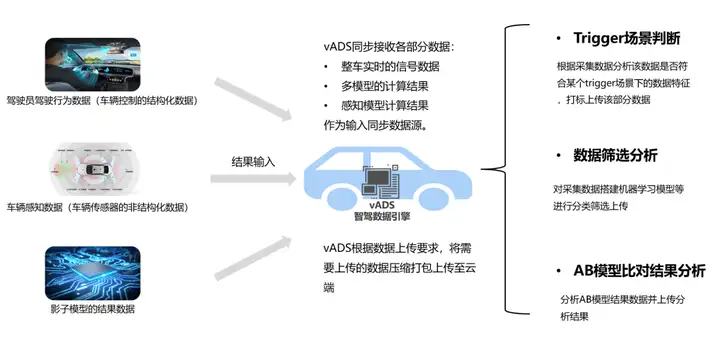
当OEM的影子模式在车辆后台运行时,通过使用EXD的车载组件,接入影子模式的结果数据与车辆运行的实际数据,进行一些基本信号数据的比对。若差异过大,比如驾驶员踩刹车的情况下,影子模式判断踩油门,则上传该时间点前后N秒的数据到云端用于异常场景分析和提取,从而可以发掘未知的Corner Case,用于完善自动驾驶模型。
4,新功能高效验证与比对
EXD支持在车端进行新功能的验证对比,将新功能作为车端后台的影子模式,持续输出执行结果;另一方面,EXD的产品组件接收对应的旧功能执行结果,用于两者的分析比对,从而实现了量产车上新功能的快速全场景能力验证。
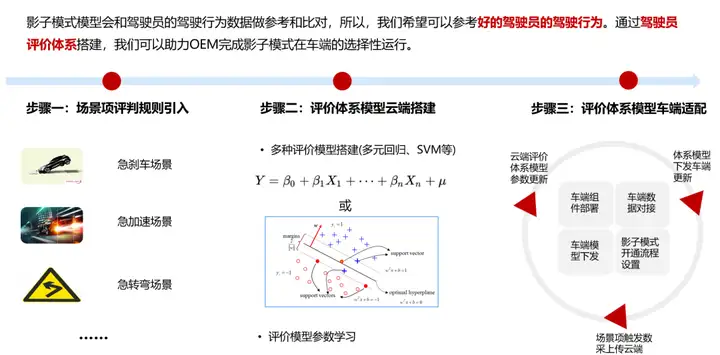
5,驾驶员评价体系搭建能力
EXD基于云端拖拉拽式的模型搭建方式,通过与主机厂联合设计驾驶员评价的逻辑规则,选择合适的模型实现后,下发至车端进行驾驶员驾驶行为的实时评分,根据评分结果判断是否需要给该驾驶员开通影子模式,从而确保影子模式的学习目标拥有良好的安全驾驶习惯。
影子模式是一种全新的数据获取方式。随着车端算力的增长,车端传感器的增多,车端数据量的暴增等,越来越多的主机厂会采取这种高效的数采方式来进行数据获取。在后续的自动驾驶技术研发与整车研发过程中,影子模式对应的数采模式会占据越来越重要的地位。EXD愿与主机厂在这一进程中,共同协作,打造数据底座,实现影子模式快速落地。

关注我们
联系我们
010-64466266
联系地址:
北京市海淀区知春路27号量子芯座10层
上海市长宁区凯旋路1388号长宁国际发展广场T1栋10层

周一至周五 上午10:00~下午18:00
版权所有 © 2023 智协慧同 All Rights Reserved 京ICP备12027719号-2
联系我们
010-64466266
关注我们
联系我们
电 话:010-64466266
商务合作:info@smartsct.com
地 址:北京市海淀区知春路27号量子芯座10层
上海市长宁区凯旋路1388号长宁国际发展广场T4栋7层
